停車場智慧方向判別解決方案─AR-403-IO-0404M
結合紅外線或感應線圈,智慧模組AR-403-IO-0404M內建RF/FF下降(車尾判別)和RF/FF上升(車頭判別)的邏輯功能,藉由偵測行進車輛位置使柵欄能準確地開啟/關閉,或提供出車警示燈以提醒行人或其他駕駛車輛,有效降低事故發生。
為何要方向辨別?
- 藉由偵測車輛位置準確地讓柵欄機知道何時開啟或關閉
- 藉由出車警示號誌或蜂鳴器以提醒交叉路口或地下室斜坡的其他車輛注意,進而有效地降低事故發生率。
AR-403-IO-0404M模組的方向判別設定
AR-403-IO-0404M系列內建4種不同功能可供選擇,搭配使用Commview工具程式進行功能變更模式,其中模式可分為:標準模式、智慧信箱模式(應用於AR-837-E控制64組信箱架構)、延遲M-0模式(多功能延遲輸出功能)、車尾判別以及車尾判別模式
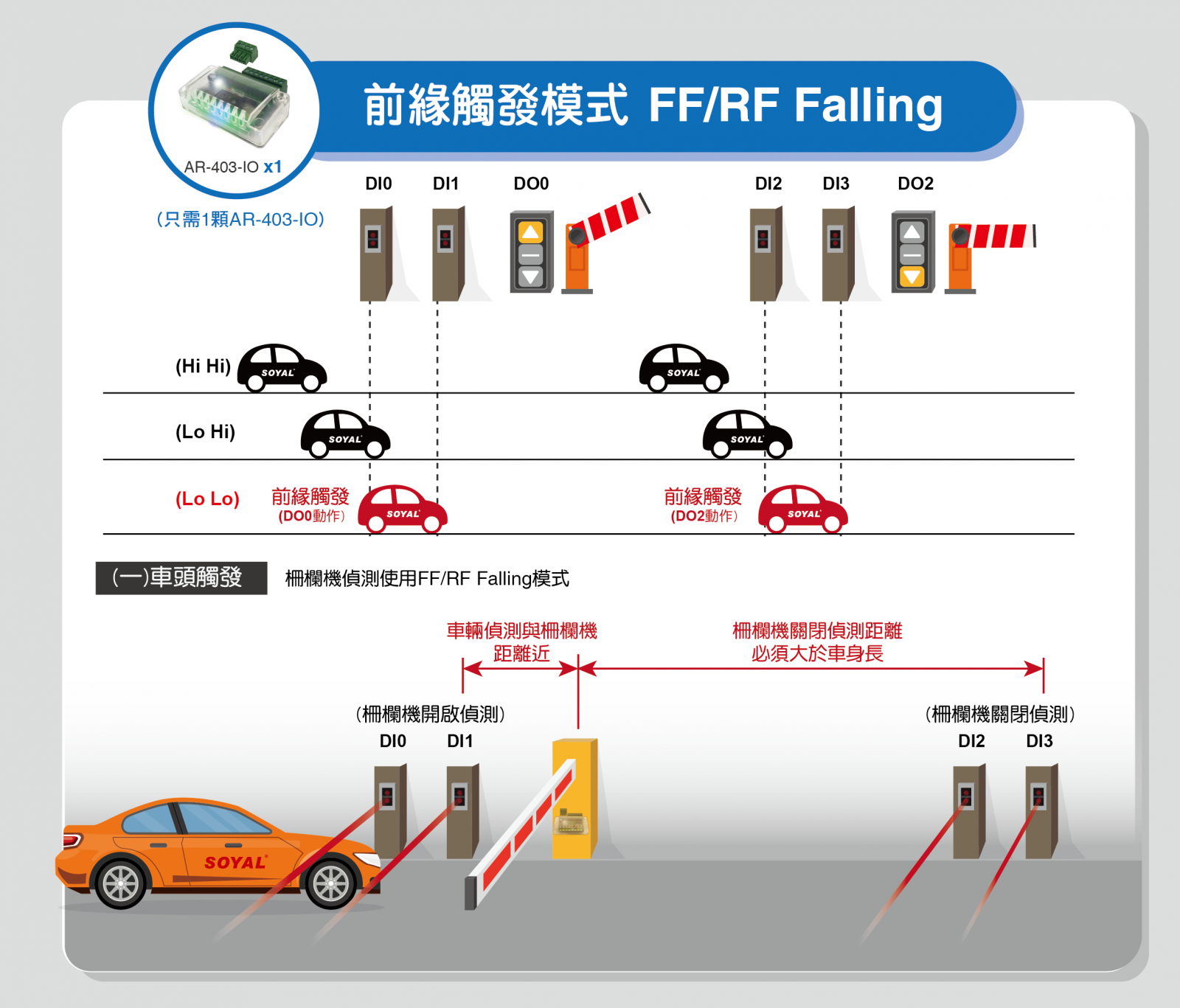
1. FF/RF falling setting 前緣觸發模式適用於車頭觸發
程式設置 :
| DI | DO |
| DI0 – DI1 | DO0 |
| DI2 – DI3 | DO2 |
2. FF/RF rising setting 後緣觸發模式適用於車尾觸發
程式設置 :
| DI | DO |
| DI0 – DI1 | DO0 |
| DI2 – DI3 | DO2 |

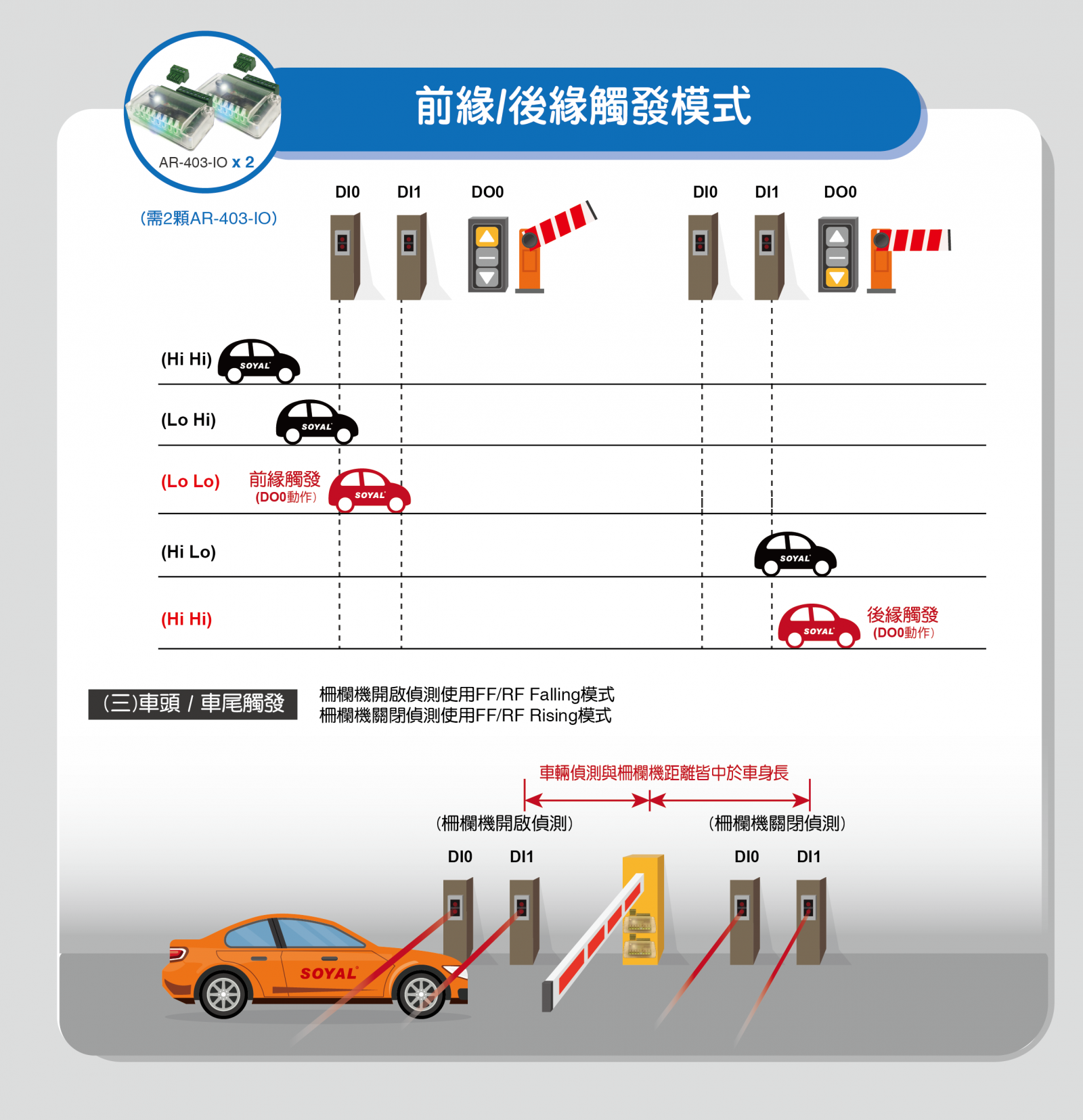
3.前緣/後緣觸發模式
A.前緣觸發
| 車輛動作 | 柵欄機距離 | IO動作順序 | 輸出 |
| 進場 | 車輛偵測與柵欄機距離近 | DIO – DI1 àDO0 | 開啟柵欄機 |
| 離場 | 柵欄機關閉偵測距離必須大於車身長 | DI2 – DI3 àDO2 | 關閉柵欄機 |
B.後緣觸發
| 車輛動作 | 柵欄機距離 | IO動作順序 | 輸出 |
| 進場 | 車輛偵測與柵欄機距離必須大於車身長 | DIO – DI1 à DO0 | 開啟柵欄機 |
| 離場 | 柵欄機關閉偵測不需1個車身長 | DI2 – DI3àDO2 | 關閉柵欄機 |
Commview工具軟體設定AR-403-IO-0404M 前/後緣觸發模式
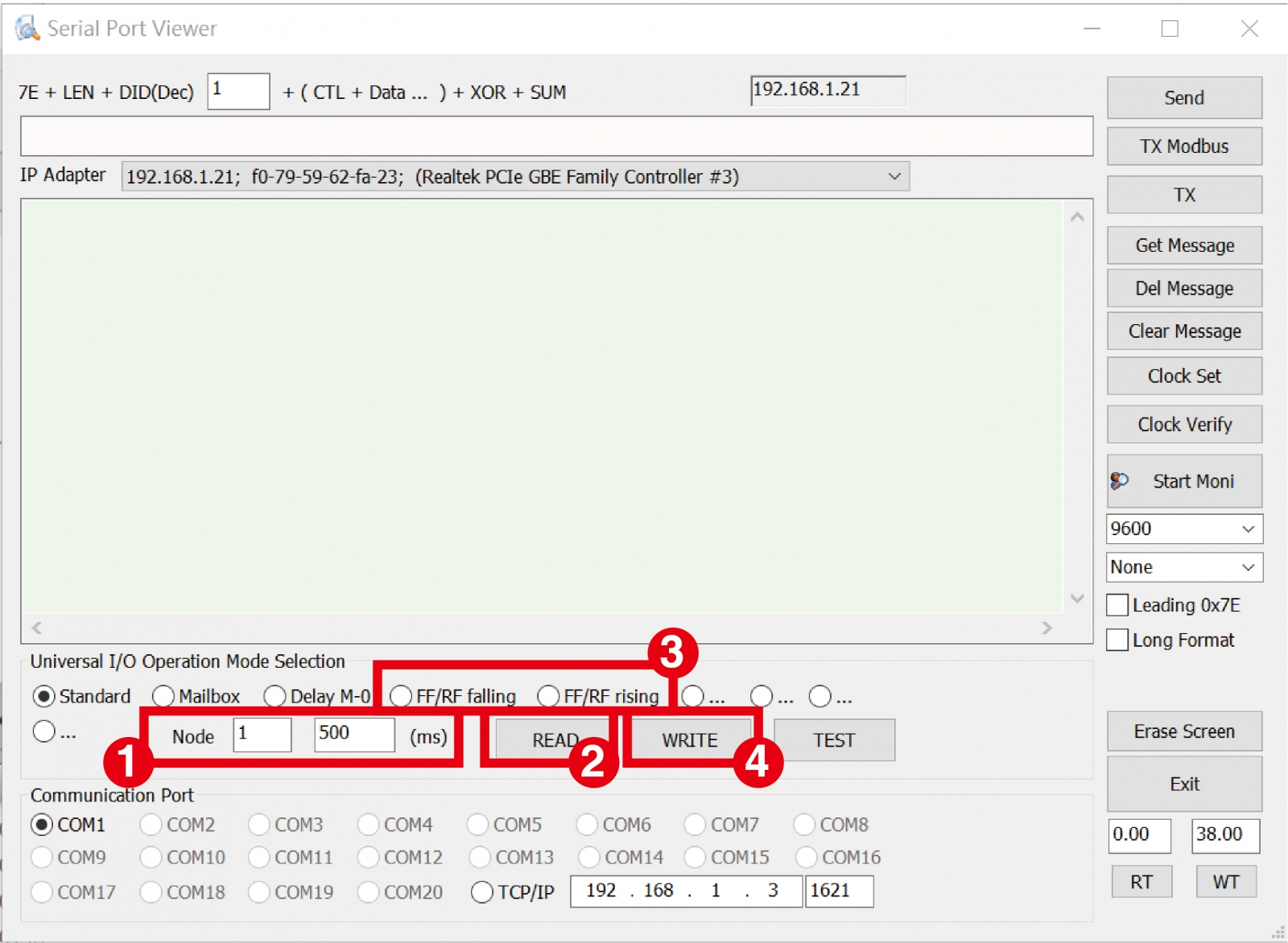
Step 1: 選擇模組站號(預設為1號)
Step 2: 按下〝讀取〞
Step 3: 選擇FF/RF falling 或 FF/RF rising模式
Step 4: 按下〝寫入〞以儲存設定
產品資訊
AR-403-IO 系列 / 萬用 I/O 模組
AR-403 Series
